Bearing Current Problems: Causes, Symptoms, and Solutions
The vast majority of bearing failures in electric motors and electric motor-driven equipment are due to mechanical and thermal causes. However, currents that flow through induction motor bearings can also create premature bearing failure.
In across-the-line driven motors, current-related bearing failures can occur due to a flow of current internally generated in a motor. The increased use of variable speed drives (VSDs) in industrial and commercial electric motor applications is also a source of bearing current flow. It should be noted that inverter-induced bearing currents and premature bearing failures occur in a relatively small percentage of installations and applications. Nevertheless, it's best to be knowledgeable on the topic in the event you run across the problem one day. Let's look at these motor system applications in detail.
Across-the-line powered motors
The most common underlying cause of unwanted bearing currents in sine wave-driven motors is alternating flux, which is a result of asymmetric magnetic properties of the stator or rotor core.
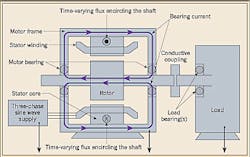
Fig. 1. In this sine wave powered motor, bearing currents
result from time-varying flux encircling the motor shaft.
Electric steel isn't totally homogeneous, so flux paths in the motor aren't entirely symmetrical. The asymmetrical flux through the steel results in time-varying flux lines that enclose the shaft. This can drive a current down the shaft, to the bearings, through the frame, and back again through the bearings, as shown in Fig. 1 above.
The resulting current isn't localized within the bearings. In fact, you can measure its driving voltage on motors with at least one bearing that's electrically insulated from the motor frame.
You can get a worst-case estimate of bearing current caused by this phenomenon by measuring the shaft end-to-end current per a method detailed in IEEE-112-2004, “IEEE Standard Test Procedure for Polyphase Induction Motors and Generators,” paragraph 8.3, Shaft Current and Voltage. You can solve this type of bearing current problem by insulating one bearing. By doing so, you break the current path.
Inverter-fed motor drive systems
With inverter-driven motors, you need a clear understanding of the high-frequency current paths from the motor terminals back to the inverter and to ground. Only then will you be able to determine potential bearing current problems and remedies.
Motors powered by fast-switching pulse width modulated (PWM) voltage source inverters experience high-frequency voltage pulses relative to motor ground. At these frequencies (up to several megahertz transitions), capacitively coupled currents can flow through paths normally considered to be insulators. In fact, currents can flow through magnet wire insulation, stator slot liners, motor air gaps, bearing grease, and stator slot top sticks.
Bearing currents resulting from common-mode voltage
For voltage or current source inverters, the common-mode voltage (CMV) contains high rates of change of voltage with respect to time (high dV/dt), so its frequency content can be in the MHz range.
Common mode currents (I) are created due to capacitive coupling of the CMV, since I = C×dV/dt, where “C” is the capacitance of the common mode circuit element. There are many potential current paths via this capacitive coupling from the motor stator winding to ground, many of which are considered as insulators.
Fig. 2. Four types of bearing currents can flow through this inverter-powered motor.
Fig. 2 above shows an inverter-driven motor system with the inverter connected to the motor through a shielded cable and the load connected to the motor shaft through a conductive coupling. The motor, cable shield, inverter, and load all have electrical grounds, denoted by downward pointing arrows. All of these grounds are connected together in some fashion (although not through zero impedance). Also shown are the paths of the capacitively coupled current. The high dV/dt created in the stator winding couples capacitively with the stator core and frame and with the rotor.
The stator-to-rotor coupling current path (red) is coupled to the rotor through the air gap, with a return path through the motor bearings, motor ground connection, and finally the driven ground. Current flow through the bearing is a consequence of two phenomena: Conduction current and discharge current.
Conduction current may flow through the motor bearing if the shaft happens to be shorted to the frame (by bearing ball contact, for example) at the instant that the dV/dt transition occurs in the CMV. Discharge current may also occur when the voltage across the bearing lubricant film exceeds the film breakdown voltage.
You won't be able to measure this capacitive current unless you have a specially instrumented motor since the entire current path is inside the motor.
The rotor-to-shaft current path (green) is also due to capacitive coupled current from the stator winding to the rotor across the air gap. This current finds a path that passes through a conductive coupling, and through at least one load bearing, to the load ground, and to the driven ground. Conduction and discharge currents can also occur with the green current path, only now the conductive or insulating state of the load bearing will determine the type of current flow.
The stator winding-to-frame/shaft current path (gold) is a capacitively coupled current between the stator winding and frame. This current flows through the stator winding insulation, which is capacitively conductive at high frequencies. With a poor motor-to-inverter high frequency ground connection, this current will also flow through the motor frame, the motor bearing, motor shaft, conductive coupling, load bearing, load ground, and finally to driven ground. The stator winding-to-frame/shaft current has the potential to create huge damage in the load bearing or, for some types of couplings, the coupling itself. You can measure this current by putting a high-frequency current sensor around the motor shaft.
Current through this path can damage the motor and load bearings as well as the motor-to-load coupling. This current path would also include currents due to a transient voltage difference between the motor frame and the driven equipment.
To reduce bearing damage, the preferred path (blue) for all these currents is the stator winding-to-ground path. Here, no current flows through the motor or load bearings.
Measurement goals for bearing current identification
The method you use to reduce or eliminate damaging bearing currents depends on which path is dominant in a particular application. Some voltage and current measurements, along with careful measurement techniques, can help you identify the sources of bearing current flow and, in some cases, the path of this flow.
However, measuring bearing currents can present significant challenges. Most of the difficulty stems from the fact that you can't practically place a transducer in the part of the bearing where the current actually flows. Furthermore, the current flow can be a brief impulse, similar to the discharge of a capacitor. As such, you'll have to rely on methods that will provide insight into symptoms of potential bearing current problems.
A key goal of any measurement is to segregate any bearing currents by identification of the type and source. Basically, each type of bearing current has its own measurement and interpretation. To check for “discharge-type” bearing currents, you can measure shaft-to-ground voltage by taking a voltage measurement across the motor bearings.
You can measure ground potential equalization currents by taking a current measurement in the motor shaft extension.
Finally, you can make a secondary check for ground currents by measuring the common mode current that enters the motor on the power leads while at the same time observing the motor ground conductor currents.
While you must use instrumentation capable of operating at high frequency to make measurements on PWM power, your “testing technique” is equally important. The choice of which trace you use to trigger your scope, as well as the type of triggering and set point, can significantly alter your recorded waveforms.
Since it's typical to document the largest magnitude signals (currents and voltages), you should adjust your scope triggering to detect these signals. A common technique is to use DC triggering, setting the trigger level high enough so that no triggering occurs initially. You should then reduce the trigger level incrementally until triggering occurs just occasionally. Because the signals aren't truly repetitive, you should take readings with each of the desired signals providing the “trigger” function.
The fact that the signals aren't identical from pulse to pulse also means that you should examine your scope capabilities for the condition of “single shot” rather than repetitive bandwidth. While you might be tempted to try to display a full fundamental cycle on your scope, the long record that this represents would degrade the actual sampling rate (and, thereby, the bandwidth) for the measurement. A typical time base measurement can be in the range of 5 microseconds per division to 200 microseconds per division.
Bearing current remediation methods
A number of options are available for reducing or eliminating the current flows shown in Fig. 1 and 2, the appropriateness of each depending on the type and source of the bearing current found.
The Table lists bearing current remediation methods for the various current paths. Each row in the table corresponds to a type of shaft and bearing current. Each column represents a potential solution. An “X” in the table indicates that the remedy, by itself, would reduce or eliminate bearing damage due to that particular component of bearing current. If you expect multiple current paths in a given application, you'll need to use multiple remediation methods.
Note that the list shows no single motor construction or system installation method that will remedy all bearing current components. Also, note that some remediation methods may reduce currents in one part of the system while increasing damaging current flow in other parts of the system.
The following are currently available bearing current remediation methods:
- Improve the high-frequency grounding connection from the motor to the drive and from the motor to the driven equipment.
- Install one insulated bearing on the opposite drive end of the motor.
- Install two insulated bearings on the motor.
- Install a shaft grounding brush across one motor bearing.
- Install a Faraday shielded motor.
- Install an insulated coupling between the motor and the driven equipment.
Implementing the correct remediation method depends on your understanding of the potential current paths in a given installation. But identifying these high-frequency paths isn't always easy. Proper grounding is key to shunting currents away from paths that flow through motor or driven equipment bearings. You should also have a thorough understanding of inverter/motor/driven equipment systems.
Schiferl is director, advanced technology, and Melfi is consulting engineer, both with Rockwell Automation in Richmond Heights, Ohio.
SIDEBAR: Common-Mode Voltage in Inverter-Powered Motors
Modern voltage-source, PWM inverters switch a DC bus voltage (VDC) onto the motor's 3-phase terminals in a switching pattern that creates the proper fundamental component voltage and frequency. Since the motor line-to-line terminal voltage must be either +VDC or - VDC, it's not possible to have the three terminal voltages add to zero at all instants of time.
Most rectifiers that create the DC bus also introduce a common-mode voltage to the DC bus itself so that the average voltage applied to the motor over a cycle is kept at zero. But the instantaneous sum of the voltages at the motor terminals, which is called the common mode voltage (CMV), isn't zero. This instantaneous voltage sum exists between the motor windings and the motor ground.
The CMV seen at the output of a low-voltage, voltage source PWM inverter is a stair-step pattern with a fundamental frequency related to the PWM carrier. For medium-voltage current source inverters, the CMV is basically a 3-times line-frequency waveform whose amplitude is a function of load.