How Precise Are Motor Nameplate Ratings?
A common assumption about induction motor nameplates is that you can use the information at face value. That applies to some but not all of the nameplate data. The power rating (hp or kW) and frame size, for example, are specific to the motor, whereas other ratings may have tolerances associated with them. The focus of this article is to explain how to correctly interpret and apply NEMA and IEC nameplate ratings for each of five operating parameters: voltage, frequency, current, speed, and efficiency.
Voltage and frequency ratings
NEMA (voltage variation). The tolerance for voltage variation under running conditions in NEMA Std. MG 1, 12.44, is ±10% of rated voltage at rated frequency. If the frequency varies from rated, the absolute value of the percent of voltage variation plus the absolute value of the percent of frequency variation should not exceed 10%, provided the frequency does not vary more than ±5% of rated.
For instance, if the voltage variation was 5.1% below rated (-5.1%), the absolute value (which ignores the “+” or “-”) would be 5.1%. Furthermore, if the associated frequency variation was 1.6% above rated (+1.6%), its absolute value would be 1.6%. Because the sum of these absolute values (5.1 + 1.6 = 6.7%) is less than 10% — and the frequency variation (+1.6%) does not exceed 5% — this voltage variation would be acceptable.
Regarding voltage variation, be aware that NEMA MG 1 also says: “Performance within these voltage and frequency variations will not necessarily be in accordance with the standards established for operation at rated voltage and frequency.”
As an example of how the NEMA standard applies to voltage variation at rated frequency, consider a motor rated 230V. Applying the +10% tolerance would yield 253V (230V + 23V), whereas the -10% tolerance would result in 207V (230V - 23V). Operating above the voltage tolerance would increase stator core heating (due to increased magnetic flux) and may increase full-load current; or, it may reduce current, operating temperature, and losses if the winding design has relatively low flux densities like many premium-efficiency motors. Running a motor below its rated voltage tolerance level would almost certainly increase stator current and heating as the motor attempts to deliver the torque required by the load. Because output torque is proportional to the square of the voltage, a motor operating at 10% below rated voltage (i.e., 90%, or 0.9) would produce only about 81% (0.9 × 0.9) of rated torque.
Note that the voltage in the above example coincides with the voltage rating of some motors that are applied on 208V systems. For those motors, the system voltage is only one volt above the rated minimum of a 230V motor, and the system can be expected to be as low as 190V — well below the tolerance for a 230V motor. This illustrates the importance of making sure the system voltage is within tolerance for the motor’s rated voltage (i.e., that the motor is applied properly).
NEMA (frequency and voltage variation). NEMA Std. MG 1 also addresses variations of both frequency and voltage — a scenario that is almost nonexistent if power is supplied by an electric utility but that can occur with generated power. For example, suppose a motor rated at 460V is operating below rated speed at 57Hz and 442V on generated power. The frequency, therefore, would be 5% below rated [1 – (57/60) = 1 – 0.95]; the voltage would be 4% below rated [1 - (442/460) = 1 – 0.96]; and the combined total of the absolute values of these variations would be 9% (4% + 5%). Although this result is within NEMA’s 10% tolerance, it is important to remember that MG 1 also warns that such variations can negatively affect motor performance.
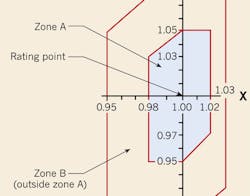
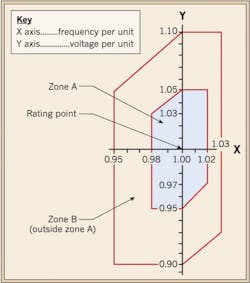
IEC (voltage and frequency variations). IEC Std. 60034-1-7.3 also addresses deviations from rated voltage and frequency, although it takes a different approach than NEMA Std. MG 1. The IEC standard considers the combined (not individual) effects of voltage and frequency variations. It also presents rated voltage and frequency tolerances graphically, with Zone A being more restrictive than Zone B (Figure on page 12). Machines in Zone A must be capable of producing rated power but, as in NEMA Std. MG 1, they “need not comply with its performance at rated frequency and voltage.” In this regard, the IEC standard (not surprisingly) cautions that the temperature rise may be higher than at rated voltage and frequency.
Zone B is clearly not intended for ongoing operation. According to IEC Std. 60034-1, operation outside of Zone A “should be limited in value, duration, and frequency of occurrence.” The standard also suggests the possibility of de-rating motors for operation in Zone B.
The tolerances for zone A are ±5% for variation from rated voltage; for Zone B, the voltage tolerance is ±10%. The frequency variation tolerances are ±2% for Zone A; for Zone B, the tolerances are +3% and -5%.
Current ratings
NEMA. The clause regarding motor current rating in NEMA Std. MG 1, 12.47 is short and to the point: “When operated at rated voltage, rated frequency, and rated horsepower output, the input in amperes shall not vary from the nameplate value by more than 10%.” This means the actual full-load current can be as much as 10% below or 10% above the value given on the nameplate. For example, if the motor nameplate rating is 100A, any value between 90A (10% less than 100) and 110A (10% greater than 100) could indicate a full-load condition.
Because the nameplate current may be different than the actual full-load current, it should not be considered an accurate indication of motor load. It should be used for most other purposes, however, such as selecting overload protection.
IEC. IEC Std. 60034-1 doesn’t address variation in current, nor does it provide a tolerance for the nameplate value. Instead, it essentially implies that the nameplate rated current is an exact value.
Speed (rpm) ratings
NEMA. NEMA Std. MG 1, 12.46 allows a seemingly liberal tolerance for full-load speed variation to account for differences in manufacturing processes and materials among motors with identical ratings. Specifically, it states that the variation “shall not exceed 20% of the difference between synchronous speed and rated speed when measured at rated voltage, frequency, and load and with an ambient temperature of 25°C.” The 20% value is not as large as it may appear, though, because it applies to slip speed (i.e., the difference between the synchronous speed of the magnetic field produced by the stator windings and the physical speed of the rotor).
For example, consider a 4-pole motor with a synchronous speed of 1,800 rpm at 60 Hz. If it is rated 1,750 rpm, its slip speed would be 50 rpm (1,800 – 1,750). Applying the 20% tolerance, the allowable variation would be 10 rpm (20% of 50). The variation is a plus-or-minus tolerance, so the actual full-load speed could vary from 1,740 rpm (1,750 - 10) to 1,760 rpm (1,750 + 10). As long as the speed at full load is between 1,740 and 1,760 rpm, the motor would be operating in accordance with its nameplate rating.
The variation between actual speed and nameplate speed leads to another caution. Do not use the nameplate speed to estimate motor load. Like the nameplate current, the nameplate speed is not an accurate indicator of load.
IEC. For small motors rated less than 1kW, IEC Std. 60034-1-12.1 allows a tolerance for speed of ±30% of the slip; the tolerance is ±20% for motors equal to or greater than 1kW. Thus, NEMA and IEC standards are in agreement for the vast majority of induction motors.
Efficiency ratings
NEMA. Per NEMA Std. MG 1, 12.58, full-load efficiency shall be not less than the minimum value associated with the nominal efficiency when a motor is operating at rated voltage and frequency. The nominal efficiency rating is identified on the nameplate by the caption “NEMA Nominal Efficiency” or “NEMA Nom. Eff.” The minimum efficiency value represents 20% higher losses than the associated nominal value. (i.e., if the nominal efficiency of a motor is 94.5%, the minimum efficiency would be 93.6%).
A series of calculations is necessary to determine the minimum efficiency associated with a nominal efficiency. For example, consider a 100-hp motor rating. The output power is 100 × 746, or 74,600W. The input power is watts output divided by efficiency, or 74,600/0.945, or 78,858W input for the nominal efficiency. The watts loss is determined by subtracting watts output from watts input, or 78,858 – 74,600, which results in 4,258W. That value is increased 20% to determine the losses at minimum efficiency; thus, 4,258 × 1.2 = 5,110W. Adding 5,110W to the output value of 74,600W results in a value of 79,710W input at minimum efficiency. The efficiency at the minimum value is determined by dividing the watts output by the watts input; that is 74,600/79,710, which equals 0.936.
The NEMA standard lists the nominal efficiencies for applicable horsepower and speed (poles) ratings, as well as the minimum efficiency for each nominal efficiency rating.
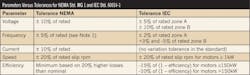
IEC. Table 20 of IEC Std. 60034-1 provides tolerances for variations in efficiency (as determined by IEC Std. 60034-2) based on the power rating of the motor. For motors rated less than or equal to 150kW, the tolerance is -15% of the result of subtracting the decimal value of efficiency from the number 1. For example, if the motor efficiency was 93.0% (0.93), the tolerance would be -15% of (1 – 0.93), or -0.0105 (-0.15 × 0.07). Similarly, for motors rated above 150kW, the tolerance is -10% of the result of subtracting the decimal value of efficiency from the number 1. The Table above gives these tolerances in mathematical form.
Putting it all together
The Table summarizes the IEC and NEMA tolerances discussed in this article. Use caution when interpreting and assessing motor performance versus nameplate ratings, especially when it involves voltage, frequency, current, speed (rpm), and efficiency.
In addition, note that although the NEMA and IEC standards for the tolerances for most of these values are similar, they may not be the same. Keep that in mind when replacing a NEMA motor with an IEC motor, or vice versa. And don’t jump to conclusions about suspected improper motor performance without using the guidance given in this article and the more complete guidance in the NEMA and IEC standards.
Bishop, P.E., is a senior technical support specialist at the Electrical Apparatus Service Association (EASA), St. Louis. He can be reached at [email protected].
About the Author
Tom Bishop, P.E.
Senior Technical Support Specialist
Bishop, P.E., joined the staff of the Electrical Apparatus Service Association (EASA) following more than 30 years of engineering experience at electrical machinery manufacturers and electrical apparatus service firms. Holding a BS in electrical engineering and a professional engineer’s license, Bishop has authored dozens of technical articles and papers as well as presented numerous seminars on electric motor application, maintenance, and repair. He is chairman of EASA’s Technical Services Committee and a principal member of the National Fire Protection Association Electrical Equipment Maintenance Committee (NFPA 70B).